Giờ làm việc:
8h - 17h
Hotline:






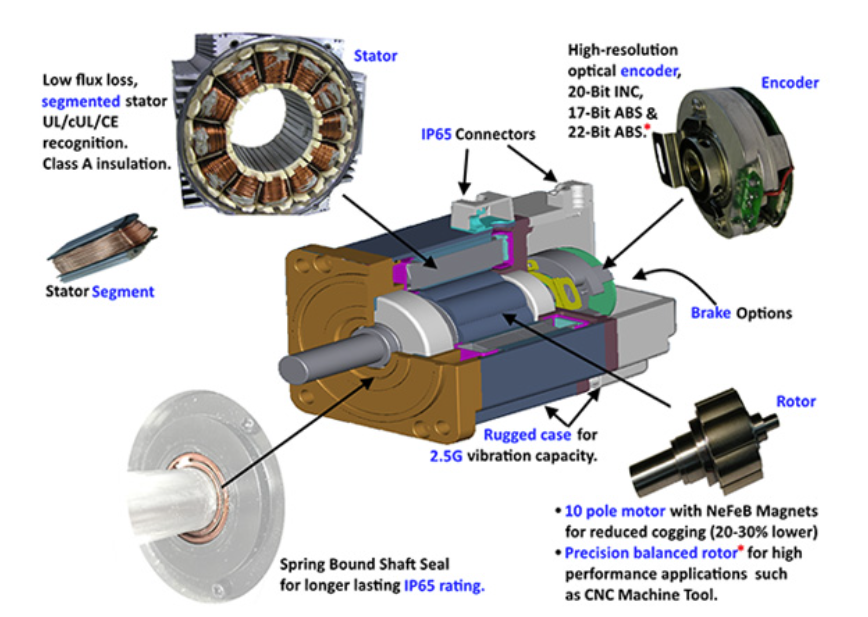
Cấu tạo của động cơ Servo bao gồm 3 bộ phận: stator, rotor (thường là loại nam châm vĩnh cửu) và encoder.
• Stator bao gồm một cuộn dây được quấn quanh lõi, được cấp nguồn để làm quay rotor.
• Rotor được cấu tạo bởi nam châm vĩnh cửu.
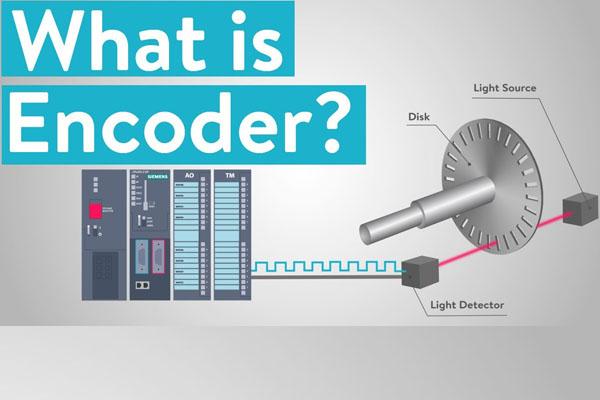
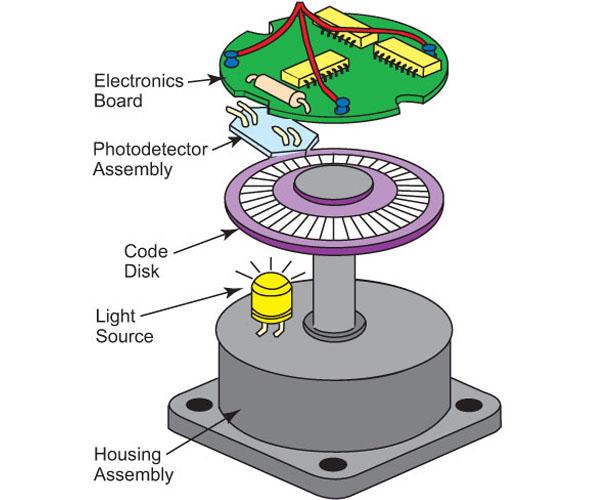
• Encoder được gắn sau đuôi động cơ để phản hồi chính xác tốc độ và vị trí của động cơ về bộ điều khiển.
Bộ phậniện tại có 2 dạng encoder được sử dụng chính cho các bộ Servo:
Cùng với sự phát triển của động cơ thì encoder cũng là bộ phận được cải tiến liên tục theo thời gian khi độ phân giải encoder được gắn lên trục động cơ ngày càng cao (từ 17 bit đến 23bit) đem lại độ phản hồi vị trí sai lệch là ít nhất đáp ứng cho ứng dụng như robot hay CNC. Với các độ phân giải lớn hơn công nghệ thu phát quang học được thay thế bằng công nghệ bắt điểm cực từ (thay thế việc đục lỗ thành các điểm gắn nam châm cực nhỏ) giảm thiểu sai sót cơ khí trong chế tạo. Với encoder tuyệt đối cho phép lưu trữ vị trí của hệ thống sử dụng pin cho phép hệ thống thiết lập hệ tọa độ chuẩn và định vị vị trí hiện tại của cơ cấu
Việc kết nối giữa bộ Driver hay Amplifier với động cơ và encoder được sử dụng qua cáp động lực (motor cable) và cáp bộ mã hóa (encoder cable).
Đối với các động lực thường gồm 4 dây U,V,W và PE để lần lượt kết nối 3 đầu dây của động cơ và 1 chân nối đất. Tùy thuộc vào nhà sản xuất mà với động cơ có tích hợp phanh ta cần cáp phanh riêng (có 2 dây) hoặc được đi kèm với cáp động lực (cáp 6 dây).
Đối với cáp bộ mã hóa (Encoder cable) tùy thuộc vào chế tạo của mạch Encoder mà sẽ có số lượng dây tín hiệu khác nhau nhưng đặc điểm chung là được làm từ dây có bọc chống nhiễu rất tốt để giảm thiểu ảnh hưởng của các yếu tố khác đến dữ liệu vị trí được gửi về.

1. Tổng quan về động cơ servo INVT IMS20A
Động cơ servo INVT IMS20A là một trong những dòng sản phẩm nổi bật của hãng INVT, chuyên dùng trong các ứng dụng tự động hóa công nghiệp như: máy CNC, dây chuyền sản xuất, robot công nghiệp...
Dòng IMS20A có đặc điểm nổi bật:
Độ chính xác cao
Phản hồi nhanh
Tích hợp encoder để phản hồi vị trí
Dễ tích hợp vào hệ thống
Tuy nhiên, trong quá trình vận hành, dòng servo này có thể gặp phải các lỗi liên quan đến encoder, gây ảnh hưởng lớn đến hoạt động của hệ thống. Bài viết này sẽ tập trung vào sửa động cơ servo INVT IMS20A lỗi encoder, giúp bạn hiểu rõ nguyên nhân, cách xử lý và phòng tránh hiệu quả.
Encoder là thiết bị đo góc quay, tốc độ và vị trí trục motor, gửi tín hiệu phản hồi về driver để đảm bảo hệ thống hoạt động chính xác.
Có hai loại encoder phổ biến:
Incremental Encoder: Gửi tín hiệu xung khi quay, cần hệ thống tính toán vị trí dựa trên số xung.
Absolute Encoder: Mỗi vị trí tương ứng với một mã hóa duy nhất.
Dòng INVT IMS20A thường tích hợp incremental encoder 2500ppr, rất nhạy với nhiễu và dễ hỏng nếu điều kiện môi trường không đảm bảo.
Một số biểu hiện thường gặp khi động cơ servo INVT IMS20A lỗi encoder:
Màn hình driver báo lỗi như: Err17, Err23, Err33
Động cơ không quay hoặc quay giật
Tốc độ quay không ổn định
Máy dừng đột ngột khi đang vận hành
Quá trình đồng bộ hóa vị trí thất bại
Việc phát hiện sớm lỗi encoder sẽ giúp giảm thiểu thiệt hại và tránh dừng máy không mong muốn.
Việc sửa động cơ servo INVT IMS20A lỗi encoder sẽ hiệu quả hơn nếu bạn hiểu rõ nguyên nhân:
Dây encoder bị đứt hoặc lỏng
Nhiễu điện từ trường (EMI) từ các thiết bị xung quanh
Encoder bị nước, bụi bẩn xâm nhập
Nguồn cấp không ổn định
Va đập mạnh làm lệch trục encoder
Driver lỗi không nhận được tín hiệu phản hồi
Dưới đây là quy trình từng bước sửa lỗi encoder:
Tắt nguồn điện
Kiểm tra cáp encoder có bị đứt, gãy, cong, gỉ không
Xác định xem có dầu mỡ, bụi bẩn ở khu vực tiếp xúc
Nếu báo lỗi: Err17 (Encoder signal error) → Khả năng hỏng encoder hoặc cáp
Nếu lỗi: Err23 (Position error) → Encoder mất tín hiệu hoặc sai dữ liệu
Đảm bảo chân encoder gắn đúng sơ đồ dây
Dùng đồng hồ đo điện kiểm tra thông mạch
Kiểm tra xung vuông A, B
Nếu không có → Encoder hỏng
Nếu méo, nhiễu → Nguồn hoặc cáp nhiễu
Chọn đúng model tương thích
Gắn chắc chắn trục encoder
Cấu hình lại thông số trong driver
Quay nhẹ trục motor để kiểm tra phản hồi encoder
Kiểm tra lại các lỗi có còn hiển thị hay không
Để sửa lỗi encoder hiệu quả, bạn cần:
Oscilloscope (hoặc máy phân tích tín hiệu)
Đồng hồ vạn năng
Bộ tua vít, kìm điện
Bộ thay thế encoder (nếu cần)
Thiết bị vệ sinh chống tĩnh điện
Laptop có phần mềm lập trình INVT (nếu cần chỉnh thông số)
Một số kỹ thuật phổ biến:
Đo xung A/B/Z bằng oscilloscope
Đo điện trở và thông mạch của dây encoder
Dùng phần mềm chẩn đoán của INVT để kiểm tra phản hồi trục
Ngoài lỗi encoder, servo INVT IMS20A có thể bị:
Lỗi quá nhiệt (Err41)
Lỗi quá dòng (Err12)
Lỗi mất pha (Err07)
Lỗi quá tốc độ (Err19)
Trong nhiều trường hợp, những lỗi này liên quan gián tiếp đến encoder do phản hồi sai làm hệ thống mất kiểm soát.
Tự sửa phù hợp nếu bạn:
Có kiến thức kỹ thuật cơ bản
Biết dùng thiết bị đo lường
Có encoder thay thế đúng model
Gọi kỹ thuật chuyên nghiệp nếu:
Bạn không xác định được lỗi
Thiết bị đang hoạt động trong môi trường sản xuất lớn
Không có dụng cụ chuyên dụng
Việc gọi dịch vụ sửa động cơ servo INVT IMS20A lỗi encoder chuyên nghiệp sẽ tiết kiệm thời gian, tránh rủi ro cháy nổ.
Chúng tôi chuyên nhận:
Kiểm tra – chẩn đoán lỗi encoder miễn phí
Thay thế encoder chất lượng cao
Hiệu chuẩn lại hệ thống
Vệ sinh, bôi trơn trục quay
Cung cấp encoder chính hãng INVT hoặc tương thích 100%
Ưu điểm:
Có mặt tận nơi trong 2h (nội thành HCM/Hà Nội)
Bảo hành 3-6 tháng
Báo giá minh bạch – không phát sinh
Liên hệ ngay: 0913121308 để được tư vấn.
Vệ sinh định kỳ khu vực motor, tránh bụi và dầu
Kiểm tra dây tín hiệu có bị mòn hoặc gập
Dùng cáp chống nhiễu và tiếp địa đúng chuẩn
Đảm bảo nguồn cấp ổn định, không dao động
Chọn đúng loại (số xung, đường kính trục, giao tiếp)
Gắn trục encoder phải đúng tâm
Không dùng lực quá mạnh khi lắp
Kiểm tra lại tín hiệu sau khi thay
Việc sửa động cơ servo INVT IMS20A lỗi encoder không quá phức tạp, nhưng đòi hỏi kiến thức kỹ thuật, dụng cụ chuyên dụng và sự cẩn trọng trong từng thao tác. Nếu bạn không chắc chắn, đừng ngần ngại liên hệ với các đơn vị sửa chữa chuyên nghiệp để đảm bảo hệ thống luôn ổn định.

Việc xác định chính xác lỗi encoder trên motor servo INVT là một bước quan trọng để đưa ra phương án sửa chữa phù hợp, tránh tình trạng "thay đại" hoặc sửa sai chỗ. Dưới đây là các bước kiểm tra chi tiết được các kỹ thuật viên chuyên nghiệp áp dụng:
Đây là bước đầu tiên, đơn giản nhưng hiệu quả. Hãy:
Kiểm tra phần jack cắm encoder có bị lỏng, gãy, gỉ sét hay không.
Rút jack ra và dùng cồn kỹ thuật vệ sinh tiếp điểm.
Kiểm tra dây cáp từ encoder đến driver có bị đứt ngầm, dập, gãy, hoặc uốn cong quá mức.
Sử dụng đồng hồ vạn năng để đo thông mạch từng lõi cáp encoder.
Đây là công cụ chính hãng từ Schneider để cấu hình và chẩn đoán servo. Các bước thực hiện:
Kết nối máy tính với driver thông qua cáp mini-USB hoặc cổng Ethernet.
Mở phần mềm SoMove hoặc EcoStruxure.
Truy cập mục "Diagnostics" → "Encoder Feedback".
Quan sát các giá trị phản hồi từ encoder như số xung, hướng quay, tốc độ tức thời. Nếu không có dữ liệu hiển thị hoặc sai lệch quá mức, encoder có thể đã hỏng.
Nếu bạn nghi ngờ encoder bị lỗi nhưng chưa chắc chắn, có thể gỡ encoder khỏi motor và dùng máy phát xung để cấp tín hiệu giả lập vào driver:
Nếu hệ thống nhận tín hiệu bình thường, lỗi nằm ở encoder.
Nếu không nhận, có thể driver cũng bị lỗi phần nhận tín hiệu encoder.
Đây là phương pháp chuyên sâu dành cho kỹ thuật viên:
Kết nối các đầu A, B, Z của encoder vào oscilloscope.
Quay trục motor bằng tay và quan sát dạng sóng.
Nếu dạng sóng A/B lệch, biến dạng hoặc không ổn định → encoder có vấn đề.
Sóng Z bị mất hoặc không định kỳ cũng là lỗi thường gặp.
Nếu có sẵn encoder cùng mã hiệu hoặc tương thích:
Hãy thay thử encoder mới vào motor.
Quan sát phản ứng của hệ thống.
Nếu lỗi biến mất → chắc chắn encoder cũ đã hư hỏng.
Không ít trường hợp lỗi không đến từ phần cứng mà do cài đặt sai thông số:
Kiểm tra lại thông số xung/ vòng (PPR) đã đúng với loại encoder chưa.
Kiểm tra chế độ vòng điều khiển (vị trí/tốc độ/momen).
Đảm bảo đúng loại tín hiệu (TTL, HTL, SinCos, EnDat,...)

CATEC Automation được thành lập bởi nhóm kỹ sư tự động hóa có nhiều năm kinh nghiệm trong lĩnh vực tự động hóa công nghiệp. Công ty chuyên cung cấp các sản phẩm và dịch vụ liên quan đến biến tần, PLC, AC Servo, HMI và các thiết bị tự động hóa khác. Ngoài ra, CATEC còn cung cấp dịch vụ bảo trì, sửa chữa và tư vấn thiết kế hệ thống tự động hóa cho các ngành công nghiệp khác nhau.
Quy trình sửa chữa AC Servo tại CATEC bao gồm các bước sau:
Tiếp nhận thông tin và thiết bị từ khách hàng
Vệ sinh và kiểm tra thiết bị để đánh giá mức độ hư hỏng.
Gửi báo cáo kỹ thuật và báo giá cho khách hàng.
Tiến hành sửa chữa, thay thế linh kiện hư hỏng.
Kiểm tra và đánh giá lại chất lượng thiết bị sau sửa chữa.
Vận hành thử tải và bàn giao thiết bị cho khách hàng.
Dán tem bảo hành và lưu trữ thông tin.
Cam kết từ CATEC
CATEC cam kết:
Sử dụng linh kiện chính hãng, mới 100%.
Giá sửa chữa không quá 30% giá trị servo mới cùng mã.
Thời gian sửa chữa nhanh chóng, hạn chế tối đa thiệt hại do gián đoạn sản xuất.
Tư vấn và hỗ trợ kỹ thuật miễn phí sau sửa chữa.
Bảo hành uy tín, dài lâu.
Các khu vực chúng tôi chuyên cung cấp Servo uy tín toàn quốc: Thành phố Hồ Chí Minh, Long An, Bình Dương, Bình Phước, Bà Rịa-Vũng Tàu, Tây Ninh, Tiền Giang, Tp. Cần Thơ, Sóc Trăng, Bến Tre, An Giang, Đồng Tháp, Kiên Giang, Vĩnh Long, Trà Vinh,...
Dịch vụ sửa AC Servo tận nơi tại TpHCM: Tân Phú, Tân Bình, Gò Vấp, Quận 1, Quận 3, Thủ Đức, Quận 5, Quận 6, Bình Tân, KCN Thuận Đạo, KCN Tân Bình, KCN Vĩnh Lộc, KCN Lê Minh Xuân, KCN Mỹ Phước 1, KCN Mỹ Phước 2, KCN Mỹ Phước 3, KCN Sóng Thần, KCN Linh Trung, KCN Hiệp Phước, KCX Tân Thuận, KCN Tân Tạo, KCN Tân Phú Trung, KCN Tây Bắc Củ,...
0913 121 308
(Tư vấn bán hàng)
0903 331 440
(Hỗ trợ kỹ thuật)

Địa chỉ văn phòng: 85/71 Bình Thành, Phường Bình Hưng Hòa B, Quận Bình Tân, TP HCM

CÔNG TY TNHH KỸ THUẬT CÔNG NGHỆ CATEC
Số CNĐKKD: 0318256846 - Nơi cấp: Sở Kế hoạch và Đầu tư TP. Hồ Chí Minh


